Over the years I have built and worked with quite a few robots. What excites me is seeing hardware and software come together to make something move!
Rando
Personal Project, 2018
Rando draws random shapes of random sizes on the floor and, also can be hard coded.
The electronics feature an Arduino nano, a DC-DC boost converter, two Li-ion 18650 Cells, Two Stepper motors, one servo motor for the pen control, and a cooling fan for the boost converter.




I built this for fun. This was inspired from LOGO the microsoft program to draw shapes. And also the turtle bot that has similar functionality.


The weighted pen is controlled with a servo motor
2. Light Painting: with Franka Emika Panda 7DOF Arm:
a personal project, 2022
I designed an LED switch box that the end effector can grab and turn on. By taking a long exposure photograph we can see the path traced by LED. Here you see the UPenn Logo being drawn in the air and creating a holographic effect.

3. Robot Arm Manipulation
Upenn Course Work, 2022



4. Battle Bot
UPenn Mechatronics course work, 2021


The waypoints were derived from a CAD sketch and the motion was executed using Inverse Kinematics. The long exposure shot was shot using a mobile app and the phone was on on a tripod.
As a part of UPenn robotics course work I to got program the arm to detect april tagged cubes and pick & place these cubes.
Here the robot is seen picking cubes from one platform and placing it on the next. Ideally in a tower!
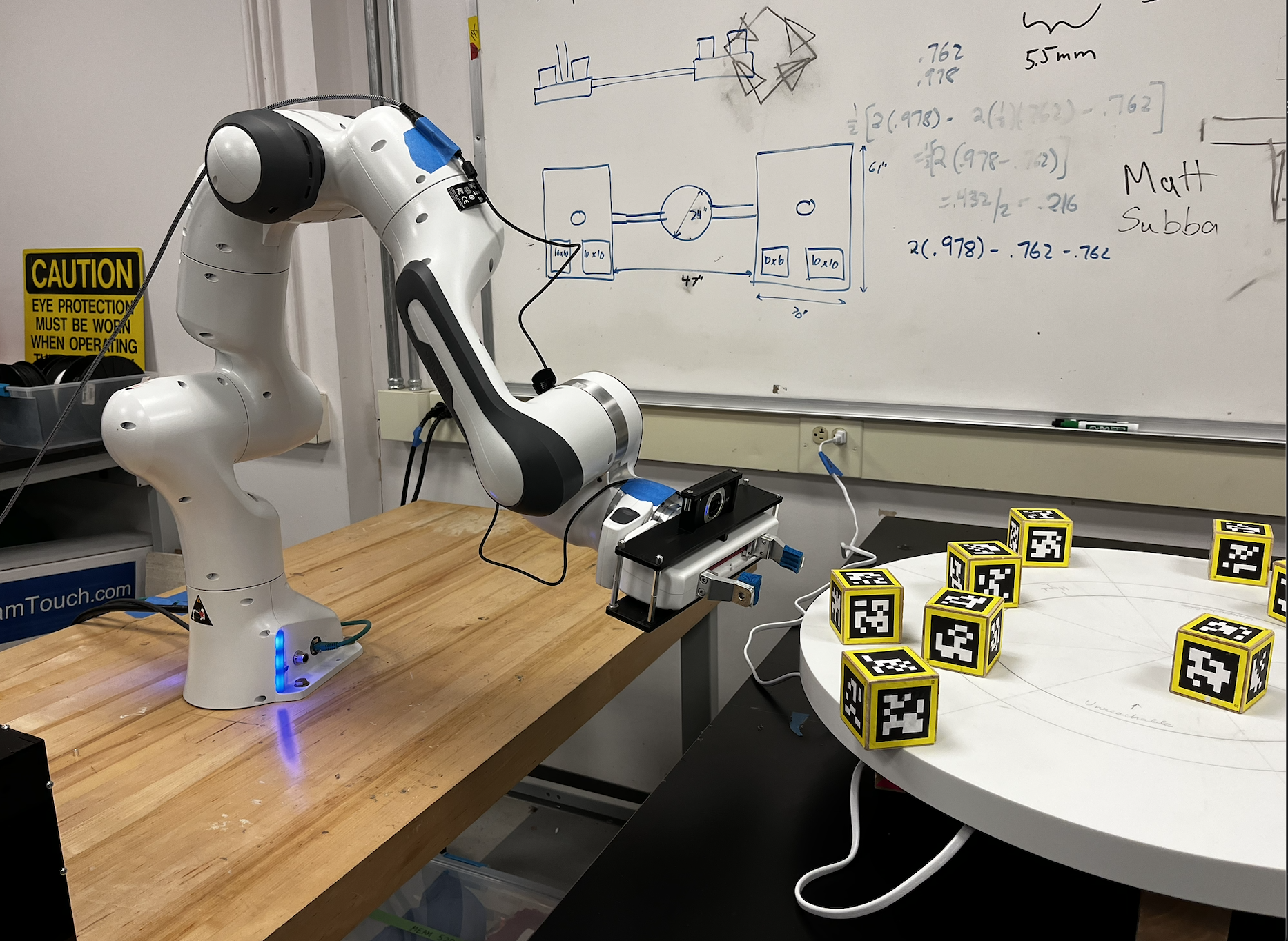



I simulated most of it in Gazebo and then proceeded to test it with the real robot arm in the lab.
There were a few things different in the simulation compared to the actual environment.
In a team of three of my close friends, we built this battle bot that could navigate using a series of Infrared cues and signals.
We also had built a manual over-ride controller to get it out when stuck!
